Titan Wandelaar
DOI:
https://doi.org/10.58445/rars.8Keywords:
robotics, nasa, mars roverAbstract
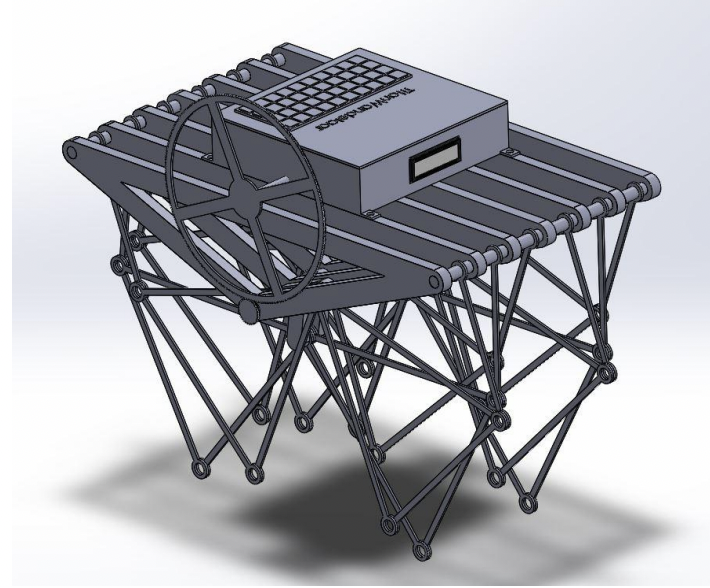
NASA and other international space organizations have been developing rovers for the past century that are designed for planets with rocky terrains such as Mars. These designs are focused on using specific types of wheels that have a certain amount of flexibility and tensile strength to allow them to drive smoothly on these surfaces. However, there hasn’t been much research done on the mechanisms that these rovers would need if they were used on planets with sandy and coarse terrain. The wheels would get stuck deep in the sand, considering that these rovers are as heavy as 2,000 pounds. Some Mars rovers such as the Spirit Rover got stuck in sand in 2010, which caused it to stop communicating with Earth. Using 4-bar linkages as the dynamic mechanism of rovers would prevent such issues from happening, as seen from linkages such as the Jansen Linkage which was designed to travel on sandy surfaces. This research will use softwares such as Mathematica, MATLAB, and Linkage to model different loci that could be produced using different bar lengths and Solidworks to design the most optimal linkage. FEA was also run on these linkages to ensure that there isn’t a disproportionate amount of stress on any of the links. An Arduino and multiple sensors will be mounted on the final TitanWandelaar in order to simulate what a rover would look like. A camera will be mounted to the Arduino to see if the linkage mechanism provides stable enough dynamics. A sand analysis station will also be mounted on the rover in order to simulate the ones that have been mounted on all the Mars rovers.
Downloads
Posted
Versions
- 2022-12-23 (5)
- 2022-12-23 (4)
- 2022-12-23 (3)
- 2022-09-28 (2)